A comunicação entre o joystick Phantom Omni e o robô humanoíde foi agora alterada de modo a que a informação seja filtrada antes de aplicada ao robô. É possível agora comandar o robô numa coordenada individualmente ou em conjunto.
quinta-feira, 29 de maio de 2014
quinta-feira, 8 de maio de 2014
Posição/Forças Tempo Real- Rviz
O filtro das posições foi aplicado em tempo real, uma vez que os limites úteis do dispositivo são de difícil percepção para o operador, uma pequena aplicação gráfica foi feita no Rviz. As forças vão sendo apresentadas ao longo do movimento com a cor verde assim que os limites forem ultrapassados essa mesma cor passa para vermelho. As grelhas a vermelho representam o espaço não útil da componente em x e a grelha branca o espaço útil da componente em x.
De modo a tornar mais perceptível a passagem pelos limites uma força extra é aplicada ao dispositivo de modo a fazer com que o utilizador retorne à posição correcta.
 |
| Fora dos limites-Com força e sem força aplicada, respectivamente |
 |
| Fora e dentro dos limites, respectivamente, com aplicação de forças |
Caracterização do joystick phantom omni-Feedback de forças
O Joystick Phantom Omni permite realimentação de Forças, que permitiram assim ao operador do dispositivo sentir as forças que estão a ser exercidas em tempo real sobre o robô que está ser controlado. A força pode ser aplicado nas suas 3 coordenadas x,y e z e têm como valor máximo 3.3 N e como valor máximo continuo 0.88 N. Embora o espaço de trabalho do joystick seja o apresentado na seguinte tabela:
|
|
X(mm)
|
Y(mm)
|
Z(mm)
|
|
Máximo
|
210
|
205
|
130
|
|
Mínimo
|
-210
|
-110
|
-85
|
O espaço real, ou seja o espaço onde a força sentida pelo operador pode ser considerada com fiável, é bastante mais reduzido. O espaço útil pode assim ser consultado na tabela seguinte:
|
|
X(mm)
|
Y(mm)
|
Z(mm)
|
|
Máximo
|
80
|
60
|
35
|
|
Mínimo
|
-80
|
-60
|
-35
|
Caracterização do joystick phantom omni -Posição
 |
| Filtro com resolução de PI/2 , em 3D e no plano, respectivamente |
 |
| Filtro com resolução de PI/4 , em 3D e no plano, respectivamente |
terça-feira, 8 de abril de 2014
Caracterização do joystick phantom omni -Orientação
{kind=link}
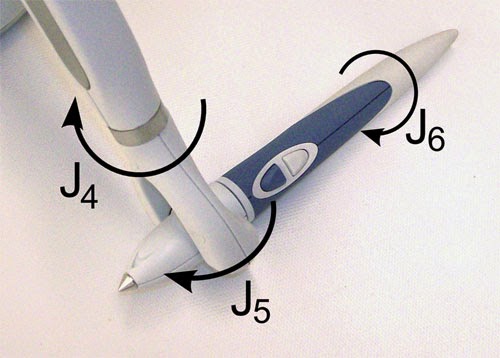
O joystick phantom omni têm 3 DOF ( J4,J5,J6 ) que correspondem a orientação.
Temos então:
É visível na tabela em cima que existe um offset de PI, em todas as orientações. Em abaixo é apresentada agora os valores das orientações após a aplicação do offset.
Temos então:
|
|
J4
|
J5
|
J6
|
|
Máximo
|
-0,765
|
-1,864
|
-0,562
|
|
Médio
|
-3,149
|
-3,141
|
-3,145
|
|
Mínimo
|
-5,534
|
-4,186
|
-5,723
|
É visível na tabela em cima que existe um offset de PI, em todas as orientações. Em abaixo é apresentada agora os valores das orientações após a aplicação do offset.
|
OFFSET=PI
|
J4
|
J5
|
J6
|
|
Máximo
|
2,384
|
1,283
|
2,578
|
|
Médio
|
0,072
|
0,091
|
-0,083
|
|
Mínimo
|
-2,628
|
-1,012
|
-2,578
|
De modo a que o valor médio de cada DOF seja exactamente 0 é necessário definir uma deadzone de 0,15.
segunda-feira, 24 de fevereiro de 2014
Apresentação

Sou o Filipe Serra, finalista do Mestrado de Engenharia Electrónica e Telecomunicações e encontro-me neste momento a realizar dissertação no LAR - Laboratório de Automação e Robótica, do Departamento de Mecânica da Universidade de Aveiro. O tema da dissertação é " Aprendizagem por demonstração aplicada a um robô humanóide".
Tornar os robôs o mais parecido com os seres humanos é um grande objectivo, mas por vezes processos como equilíbrio e marcha, envolvem algoritmos complexidade elevada, pretende-se então com este trabalho de dissertação aplicar ao robô humanóide algoritmos de aprendizagem automática baseados em demonstração de modo a permitir o equilíbrio e posteriormente a sua marcha.
Este blog serve então para dar a conhecer o trabalho à medida que o mesmo vai sendo realizado.
Subscrever:
Mensagens (Atom)